

GeoSLAM公司手持机三维激光扫描仪 ZEB-REVO

推出的轻量级旋转激光扫描仪,手持,杆装,或连接到您所选择的移动平台,如车辆或无人机,并通过您的目标测量环境记录超过40000个测量点/秒。
- 无需GPS,高精度slam匹配算法
- 100米测程,适用于常规城市街道测绘
- 可以搭载至无人机,实现地空一体化采集
- 定制化套件,可以实现背载,延长,倒置等
- Geoslam HUB处理软件,集成VIEW,DRAW,MODEL多个模块
产品特点
超便携
重量仅3.5kg,手持式ZEB-REVO可用于快速扫描多级环境。
坚固耐用
具有IP64等级,ZEB-REVO可以承受危险和恶劣的环境。
操作简单
不需要GPS或控制,一个开关操作可以减少培训要求。
快速
在几分钟内完成测量,比传统测量或地面激光扫描快得多。
工作流程
扫描
ZEB-REVO是GeoSLAM 革命性的新型手持激光扫描仪,它使扫描变得更加简单。100Hz的扫描速度和360°视野为用户提供快速,准确和高质量的数据采集方式。
配准
自动SLAM(同步 定位与地图)云对云注册,用户可试用使用GeoSLAM 桌面版或GeoSLAM
Cloud即时处理数据。
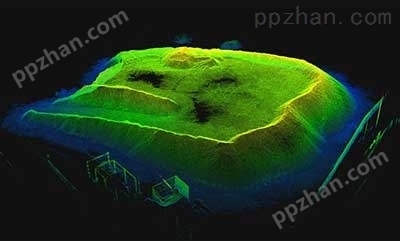
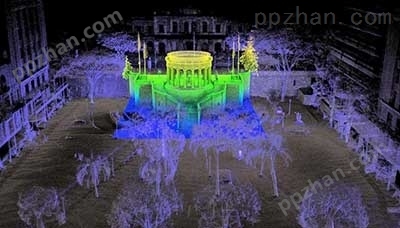
成果
生成3D 点云以及轨迹文件,提取的文件与所有主要的行业 标准后处理软件兼容。
软件
移动测绘软件
将3D扫描数据转换为可操作的信息
GeoSLAM Hub&Draw是一个全面的软件套件,可在几分钟内将3D点云数据转换为可操作的信息和有价值的可交付成果。
作为GeoSLAM完整移动映射解决方案的一部分,GeoSLAM Hub&Draw将业界的SLAM(同步定位和映射)技术与强大的后处理功能结合在一起,提供完整的端到端解决方案。
软件功能
业界的SLAM处理,可从移动数据生成准确的3D点云
自动注册多个扫描和数据集的地理参考以进行控制
导入,查看和查询从所有GeoSLAM移动映射设备捕获的数据
生成简单快速的3D测量和2D CAD交付
轻松导出数据,以便与所有主要的第三方CAD和GIS软件包一起使用
与多个利益相关方共同发布,分享和协作
应用
具有更快的扫描仪,更简单的操作和更多 的通用性。其核心是GeoSLAM业界的同步定位和测量(SLAM)算法,可以实现封闭环境的快速移动测量, 无需GPS。这种多功能性使得ZEB -REVO适合于各种各样的应用,这些应用已经证明使用使用传统的测量技术既困难又耗时。
| 测程 | 100M |
| 扫描速度 | 300000点/秒 |
| 扫描线数 | 16 |
| 工作时间 | 大于3小时 |
| 相对精度 | 1.5-3cm |
| 扫描视角 | 270°X360° |
| 存储空间 | 80GB |
| 数据大小 | 100-200MB/min |
| 防护等级 | IP54 |
| 手持重量 | 1.3KG |
行业应用举例:

堆挖方轮廓与体积测量

船舶与制造行业

公共安全管理

地下空间信息化
建筑物三维建模



